项目简介
移动机器人作为新型的生产工具,可以提高生产效率,减轻劳动强度,把人从危险、恶劣、繁重而重复的工作环境中解放出来。它在制造业,电商物流、搜救及军事排爆等领域中发挥着越来越重要的作用。
本项目是设计一种全新的全向移动轮式平台,它较一般非全向移动平台的主要区别在于它的运动方向是不受限制的。全向移动平台可以沿着任意方向做直线运而无需事先做旋转运动,并且在其直线行驶达到目标点的过程中可以随时进行自身做旋转运动来调整自己的姿势。
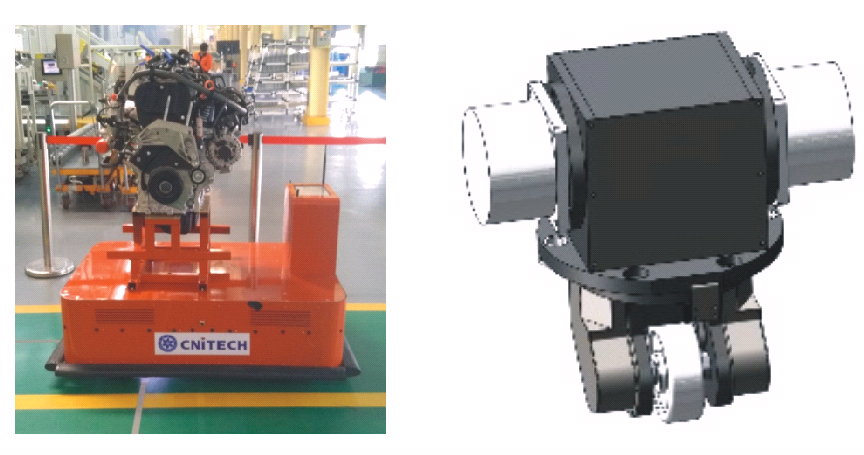
它的外形尺寸(长宽高)为1.2*10.8*0.4m,底下共设置六个轮子。其中前后各两个脚轮为被动式的,中间的两个脚轮是主动式的动力脚轮。全向移动平台之所以能够实现全向运动,关键在于中间的两个动力脚轮,它通过驱动电机和转向电机控制。
技术优势
全向移动平台的核心部件动力脚轮通过内部加入差速机构来对因转向运动而引起的额外动力输出即驱动运动和转动运动的耦合进行机械解耦,相比较非运动解耦的脚轮,它的输出更为精确,使得控制更为可靠。通过电机后端的编码器可以对脚轮的速度和位置进行实时反馈,实现闭环控制。选用驱动的电机功率为200W,载重最大150公斤,最大1m/s的运动速度。
知识产权
1、专利号:CN201410338446.5 一种用于全向移动平台的机械解耦动力脚轮
应用市场
随着企业对提高生产效率、自动化程度以及节约成本的需求加大以及政府部门对机器换人项目的大力支持,本全向移动平台项目具有广泛的应用前景。目前可以用于电商物流、加工制造业、危险场所以及特种作业等领域。随着社会的进步和科技的发展,将会有更多的行业来利用全向移动平台实现无人化作业,因而市场潜力巨大。