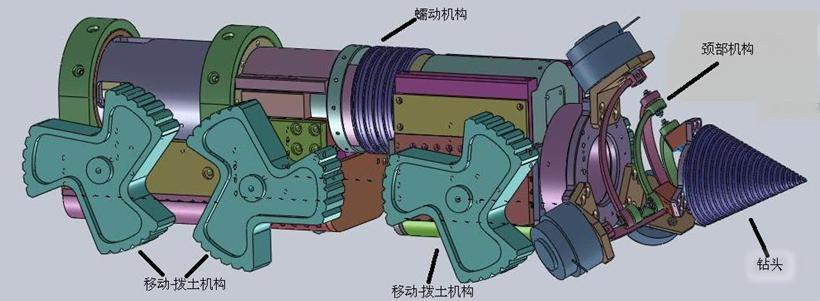
煤矿事故发生以后,主要存在着三种影响救援工作的要素:空间狭小、巷道结构不稳定、存在可燃易爆气体。这三种因素给救援带来极大的阻碍,使救援工作可能付出沉重的代价。针对上述灾难矿井存在的问题,中国科学院合肥智能机械研究所在国内外首次开展了矿难环境下仿土拨鼠矿难探测与救援机器人的研究,该研究包括仿土拨鼠并联机器人本体和控制系统研究,用于灾难环境的瓦斯检测以及预警系统研究和面向煤矿救援应用的无线传感网络系统三个方面的研究。由于灾难环境的复杂性和不可预知性,我们研究的仿土拨鼠并联机器人主要包括能够实现头部360°灵活转动的颈部并联机构,能够实现狭小空间的掘进运动的腰部蠕动机构和能够实现行进和碎煤传送功能的腿部行进拨土机构,该整体机构符合土拨鼠的形态与功能仿生,具有很强的新颖性。由于具备上述三种功能,机器人进入矿难现场后,能通过并联颈部机构钻土、腿部拨土以及腰部蠕动等功能实现在狭小空间等复杂非结构环境中行进,并利用自身携带的多种传感器进行环境探测,将相关信息通过无线网络传送到地面监测站,帮助救援人员规划搜寻和救援行动;本项目研究可为煤矿安全与救援机器人的基础理论发展和灾难救援机器人产业化实现做出实质性贡献。