膝关节是人体功能最重要、构造最复杂的关节之一,几乎所有的下肢运动都需要膝关节直接或间接参与;老年人因膝关节退化,肢体健全的残障人士因膝关节乏力,不同程度地限制了他们的下肢运动能力,而目前市面上已有的拐杖、轮椅等辅助性产品无法提供用户所需的下肢助力功能。
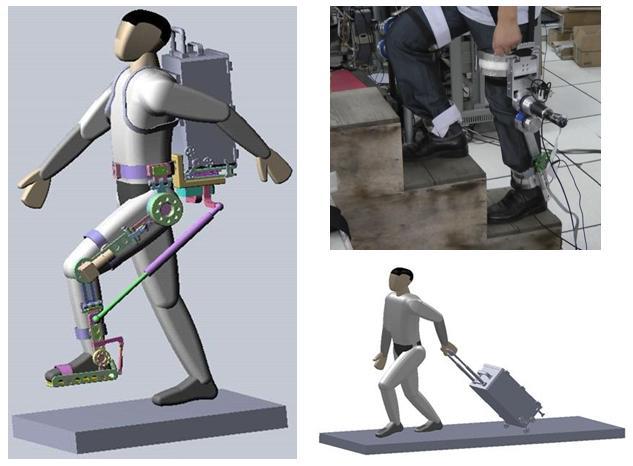
可穿戴型下肢膝关节助力机器人是一种典型的人机一体化系统,由可穿戴于人体下肢部位的助力机械装置、动力装置、控制系统以及判断与预测人体运动信息的传感系统等功能模块组成,可帮助老年人或肢体健全的残障人士扩展其在日常行走和上下楼梯时下肢部位的运动能力;助力机器人设有可起缓冲与支撑作用的随动气弹簧装置,在实现下肢关节旋转传力的同时,也起到了支撑负载的作用;设有腿部力传感器和腰部加速度传感器,可多方位感知与反馈人体运动信息;具备摔倒报警功能;手控操作器的设置可协助用户人工干预机器人的助力模式;足底分布式力传感器的设计能够进一步提供人体腿部运动的相关信息;足底设有软垫层,有助于提高人体脚部穿戴的舒适度;机器人将MCU微控制器和锂电池组均配置于后腰支架上,保证系统结构的紧凑性以及电池接口的通用性;机器人采用类似折叠式自行车的收藏方式,用户在机器人助力使用过程结束后可将其折叠收藏,配合拉杆箱可方便实现对机器人的日常携带。
该成果在民用生活领域具有广阔的产业化应用前景,也可推广至医疗救助及军事装备领域。