l 必要性及需求分析:
受运动模式的限制,目前研制出的移动机器人大多是基于单一作业环境。两栖机器人虽然一定程度上增强了只具备单一运动模式的移动机器人的环境适应性,但同样具有局限性。同样,适于空中飞行的机器人可以很好的完成空中作业,但难以适应陆地和水下作业要求。所以,变革移动机器人的机构设计和运动模式,研究开发能适应复杂的水陆空作业环境的三栖机器人,是机器人研究领域的一个新的重要研究方向。除了要求机器人具有多环境全地形适应能力外,良好的机动性、节能高效、自主等也是重要的发展趋势。
l 现有工作基础:
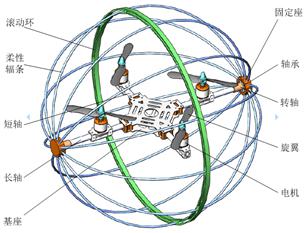
本项研究对三栖移动机器人开发所涉及的关键技术进行了彻底的研究,突破了轻质高刚度的机械结构设计、自主切换的控制系统设计、动力飞行系统设计等技术,开发了三栖机器人样机,申请了数项发明专利,可用于产业化。
l 预期经济和社会效益:
本项目开发的四旋翼机器人为四旋翼无人机产品开发打下了技术基础,在本项目成果的基础上,如果继续投入经费,可以开发出自主型无人机产品,相较目前市场上广泛存在的遥控飞行无人机而言,自主性大大提高,是真正的无人机,具有飞行范围更大、飞行更灵活可靠、安全性更高等特点,具有广阔的市场需求。