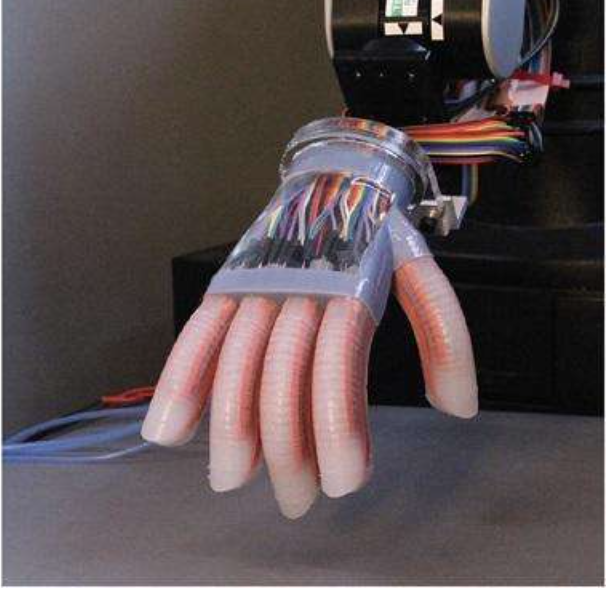
本发明提供了一种基于形状记忆合金-柔体复合结构的柔性操作手,所述柔性操作手由若干SMA-柔体复合结构单元以操作手基座为中心的圆周有规律的分布,SMA-柔体复合结构的一端与操作手基座连接,另一端为自由端。SMA-柔体复合结构包括SMA丝、定位板、可嵌入片状板及柔性包裹材料,所述定位板中间有若干SMA丝定位孔,另一方面,定位板也被用于连接驱动器单元和操作手基座;所述可嵌入片状板是一种可变形的高分子化合物,所述柔性包裹材料是一种具有从液态固化成固态的一种化学物质;每个所述的SMA-柔体复合结构采用嵌入式分层浇注成型。本发明通过SMA丝与多种材料的组合,实现了一种高负载能力、高抓取频率的柔性操作手。